Sistema d'integrazione di Robot Delta
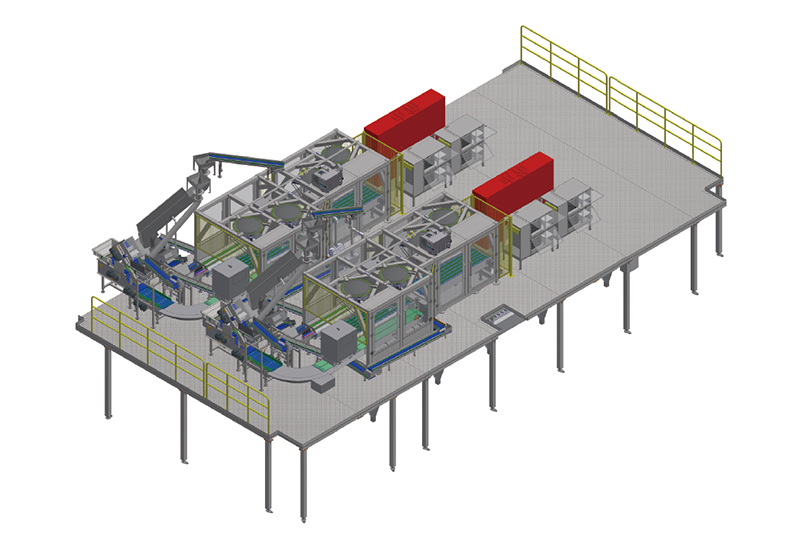
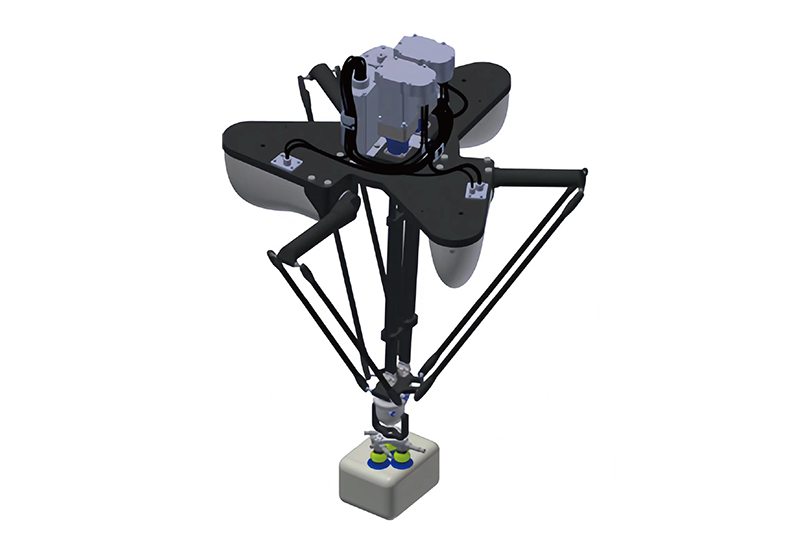
I prudutti di l'imballu internu senza ordine sò scaricati da u magazzinu. Dopu esse stati urdinati da u servo-riordinatore è a pusizione di u pruduttu hè ricunnisciuta da u sistema visuale. Durante a macchina di imballaggio, u sistema visuale sparterà l'infurmazioni cù u robot spider, è u robot spider piglierà è piazzerà i prudutti in l'imballu esternu currispundente.
Applicazione
Adattu per urdinà, identificà è piglià prudutti di imballaggio interni senza ordine in forma di buttiglie, tazze, barili, sacchetti, cum'è tè di latte in polvere, vermicelli, tagliatelle istantanee, ecc., è metteli in l'imballaggio esternu.
Disegnu 3D


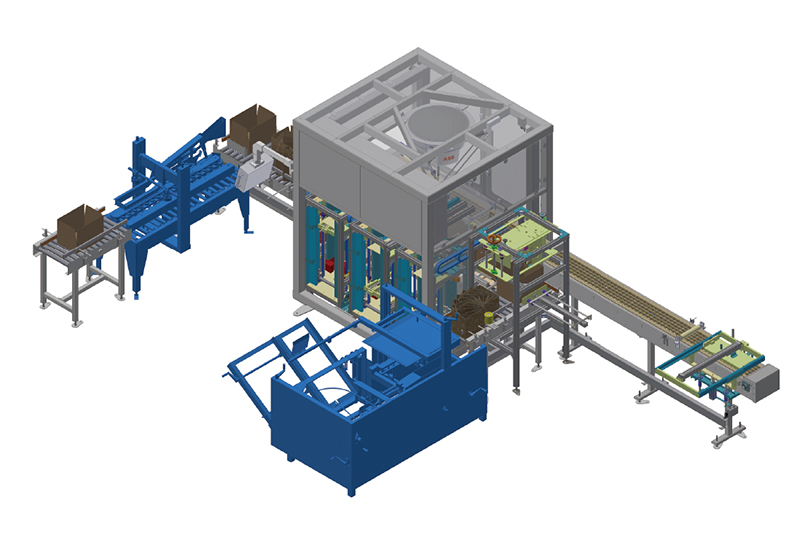
Linea d'imballaggio
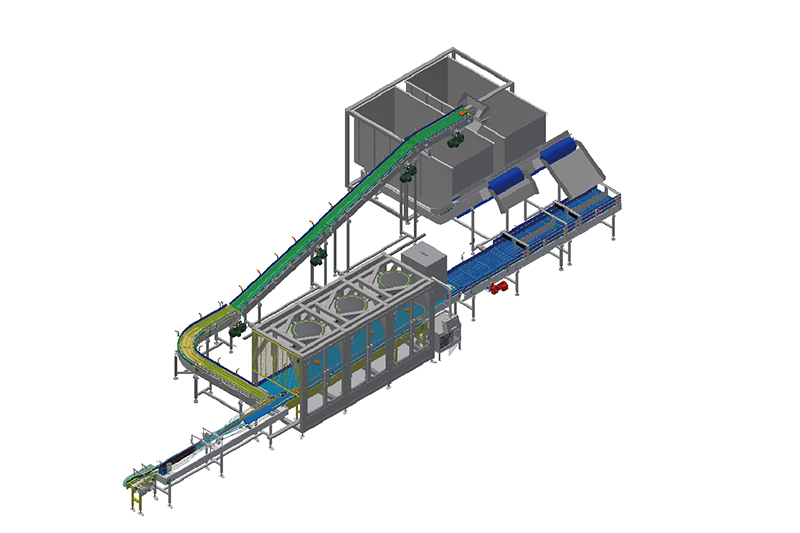
Linea di riordinatore

Cunfigurazione elettrica
| PLC | Siemens |
| Variatore di frequenza | Danfoss |
| Servomotore | Elau-Siemens |
| Sensore fotoelettricu | MALATU |
| Cumponenti pneumatichi | SMC |
| Schermu tattile | Siemens |
| Apparatu di bassa tensione | Schneider |
| Terminale | Fenice |
| Motore | CUSÌ |
Parametru tecnicu
| Modellu | LI-RUM 200 |
| Velocità stabile | 200 pezzi/min |
| Alimentazione elettrica | 380 AC ±10%, 50 Hz, 3 FA + N + PE. |
Più spettaculi video
- Linea di classificazione, alimentazione, riordino è imballaggio di scatole cù robot Delta






