Depalletizatore roboticu
Dettagli di u pruduttu
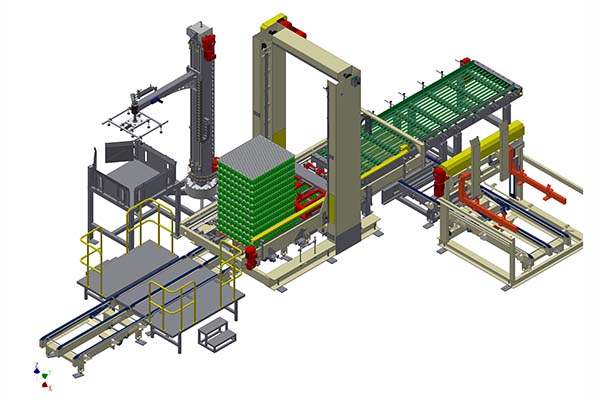
Durante a pruduzzione, tutta a pila di prudutti hè trasportata da un trasportatore à catena à a stazione di depalettizazione, è u mecanismu di sollevamentu alzerà tuttu u pallet à l'altezza di depalettizazione, è dopu u dispusitivu di aspirazione di fogli interstrato piglierà u fogliu è u piazzerà in u magazzinu di fogli, dopu à quessa, a pinza di trasferimentu moverà tuttu u stratu di prudutti à u trasportatore, ripetite l'azzioni sopra finu à finisce a depalettizazione di tuttu u pallet è i pallet vioti andaranu à u cullettore di pallet.
Applicazione
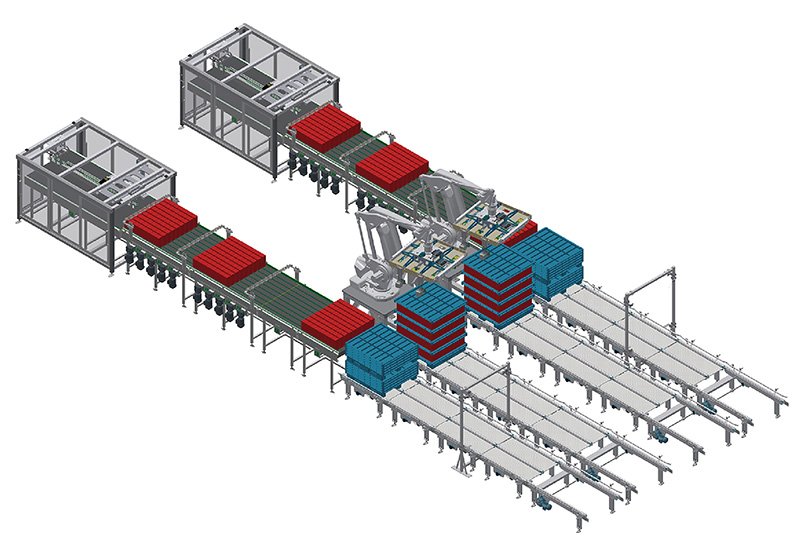
Adattu per u scaricamentu automaticu di scatule, buttiglie in PET, buttiglie in vetru, lattine, barili di plastica, barili di ferru, ecc.
Esposizione di u produttu


Disegnu 3D

Cunfigurazione elettrica
| Bracciu roboticu | ABB/KUKA/FANUC |
| PLC | Siemens |
| Variatore di frequenza | Danfoss |
| Servomotore | Elau-Siemens |
| Sensore fotoelettricu | MALATU |
| Cumponenti pneumatichi | SMC |
| Schermu tattile | Siemens |
| Apparatu di bassa tensione | Schneider |
| Terminale | Fenice |
| Motore | CUSÌ |
Parametru tecnicu
| Modellu | LI-RBD400 |
| Velocità di pruduzzione | 24000 buttiglie/ora 48000 tappi/ora 24000 buttiglie/ora |
| Alimentazione elettrica | 3 x 380 AC ±10%, 50 Hz, 3 FA + N + PE. |
Più spettaculi video
- Depalettizzatore robot per buttiglie cù linea di divisione è fusione
- Depalettizzatore robot per scatule cù linea di divisione è fusione