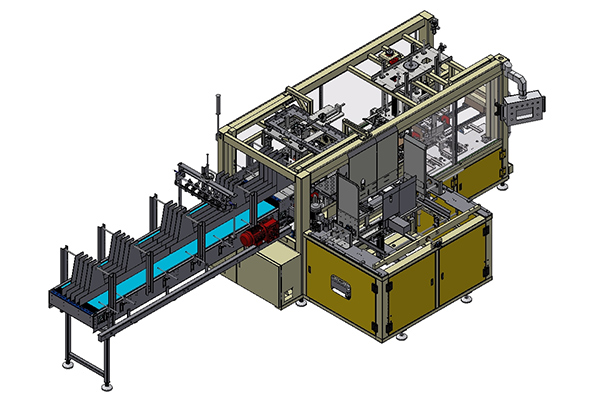
Linea di imballaggio di scatule di coordinate servo (cù partizione di cartone)

A linea di pruduzzione di imballaggi hè cumposta da un divisore à alta velocità, una linea di trasportu di prudutti, una linea di trasportu di presa, Hbot, un mecanismu di muvimentu à doppiu arbre, una linea di trasportu di scatule, un mecanismu di rilevazione, una pinza per partizioni di cartone, un sistema di alimentazione di partizioni di cartone, una servocoordinata, una pinza per buttiglie è una recinzione protettiva. U divisore à alta velocità divide i prudutti in più corsie, mentre chì u mecanismu di muvimentu à doppiu arbre accelera u passaghju di i prudutti. Dopu chì u pruduttu ghjunghje à a stazione di partizione di cartone, u robot Scar carica a partizione di cartone in i prudutti disposti. I prudutti ghjunghjenu à u trasportatore di smistamentu. Dopu, i prudutti sò prelevati da a pinza è piazzati in a scatula di cartone, è u trasportatore di scatule trasporta a scatula chì cuntene u pruduttu fora.
U schema cumpletu di u sistema d'imballaggio

Cunfigurazione principale
| Bracciu roboticu | ABB/KUKA/Fanuc |
| Motore | SEW/Nord/ABB |
| Servomotore | Siemens/Panasonic |
| Variatore di frequenza | Danfoss |
| Sensore fotoelettricu | MALATU |
| Schermu tattile | Siemens |
| Apparatu di bassa tensione | Schneider |
| Terminale | Fenice |
| Pneumaticu | FESTO/SMC |
| Discu aspirante | PIAB |
| Cuscinettu | KF/NSK |
| Pompa à vuoto | PIAB |
| PLC | Siemens /Schneider |
| HMI | Siemens /Schneider |
| Piastra/catena di catena | Intralox/rexnord/Regina |
Descrizzione di a struttura principale




Più spettaculi video
- Imballatrice à coordinate servo per buttiglie di vetru cù partizione di cartone